OVLÁDÁNÍ POLOHY SERV S MPU6050
Vlastimil Vágner
S kamarádem také modelářem jsme minulý rok konečně dokončili model a jeho napadlo zda by šlo využít modul MPU6050 který má hodně dlouho doma bez využití, na držení jedné nastavené části modelu pomocí serva v nastavené úrovni stupňů v ose „X “ i když se bude model pohybovat v terénu. Kde se tato hodnota jízdou bude měnit, z důvodu že chtěl současně mít přehled o napětí zdroje a dalších hodnotách v modelu s tím že v modelu nám již moc místa nezbylo zvolil jsem na pokusy ARDUINO NANO. V případě překročení nastavení určité hodnoty se model zastaví tak že jsme zvolili přenos na telefon pomocí bluetooth pro zpětný přehled hodnot, model nejezdí dále jak 30m od řidiče což bluetooth zvládá a celé zařízení pracuje autonomně bez zásahu z RC soupravy. Zde uvedený program je pouze pro ovládání uvedeného serva pro řízenou osu „X“ a osu „Y“ bez dalších doplněných funkcí, může posloužit pro inspiraci při podobných projektech.
MODUL MPU6050
Dnes jsou již k dispozici novější typy uvedený modul obsahuje akcelometr a gyroskop dále obsahuje i DMP procesor pro výpočty v tomto programu není použit, komunikace s mikrokontrolérem je pomocí I2C sběrnice, data jsou pro všechny osy „X, Y, Z“ jak z akcelerometru i gyroskopu načítána v 16-bitové hodnotě. Arduino Nano je osazeno v ARDUINO SHIELDU kde jsou připojeny i serva a MPU6050, z uvedeného shieldu jsou napájeny serva i MPU6050 při testování programu, schéma zapojení přípravku je na Obr.č.01.
PROGRAM
Je uložený v adresáři „PROGRAM“ má název SERVA_MPU6050 využívá knihovny „MPU6050, WIRE, I2Cdev, SERVO“ po nahrání programu pokud nemáme ARDUINO NANO v shieldu a po jeho osazení do shieldu a před spuštěním programu s připojenými servy a modulem MPU6050 je nutné spustit v IDE ARDUINA sériový monitor, nebo je možné využít i jiný externí sériový terminál, po připojení napájení do shieldu se zobrazí na monitoru PC informace zda je modul MPU6050 aktivován a navázaná komunikace. V případě že je komunikace mezi Arduino a modulu MPU6050 v pořádku se již budou serva pohybovat v osách „X, Y“ tak jak budeme modul MPU6050 naklánět. Nyní ukončíme sériový monitor v IDE nebo ukončíme spuštěný externí sériový terminál vypneme napájení a odpojíme shield tím je oživení ukončeno.
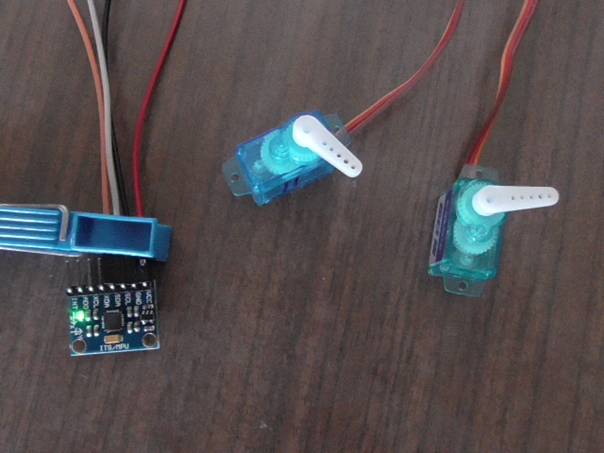
Připojení serv a modulu MPU6050 k shieldu s Arduino Nano
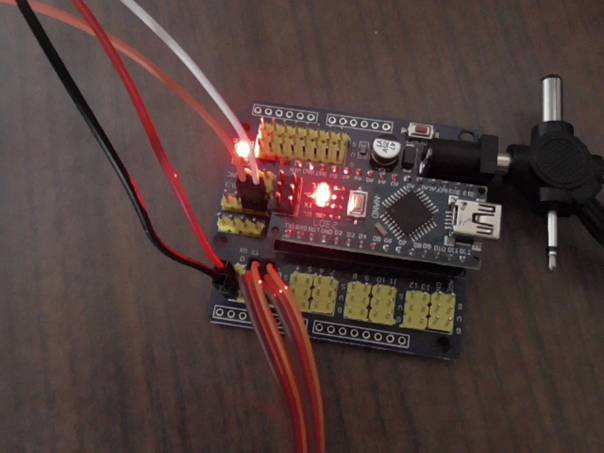
Uvedený shield pro Arduino Nano s připojenými servy a komunikací I2C.
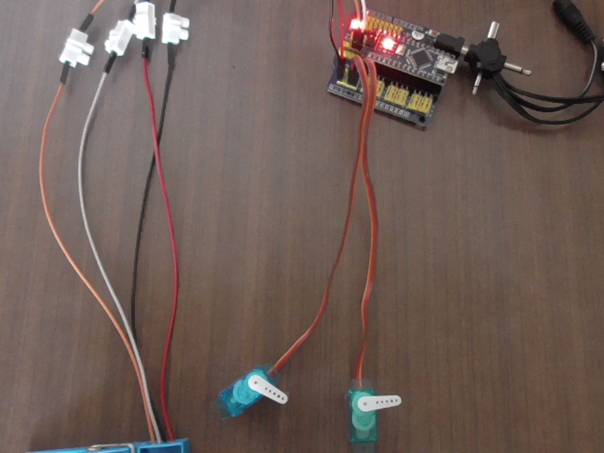
Celkový pohled připojených serv a MPU6050 při testování programu.
Použité prameny :
Bližší informace :